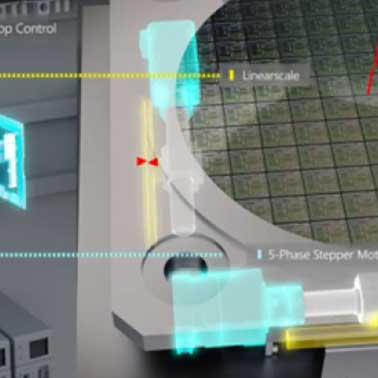
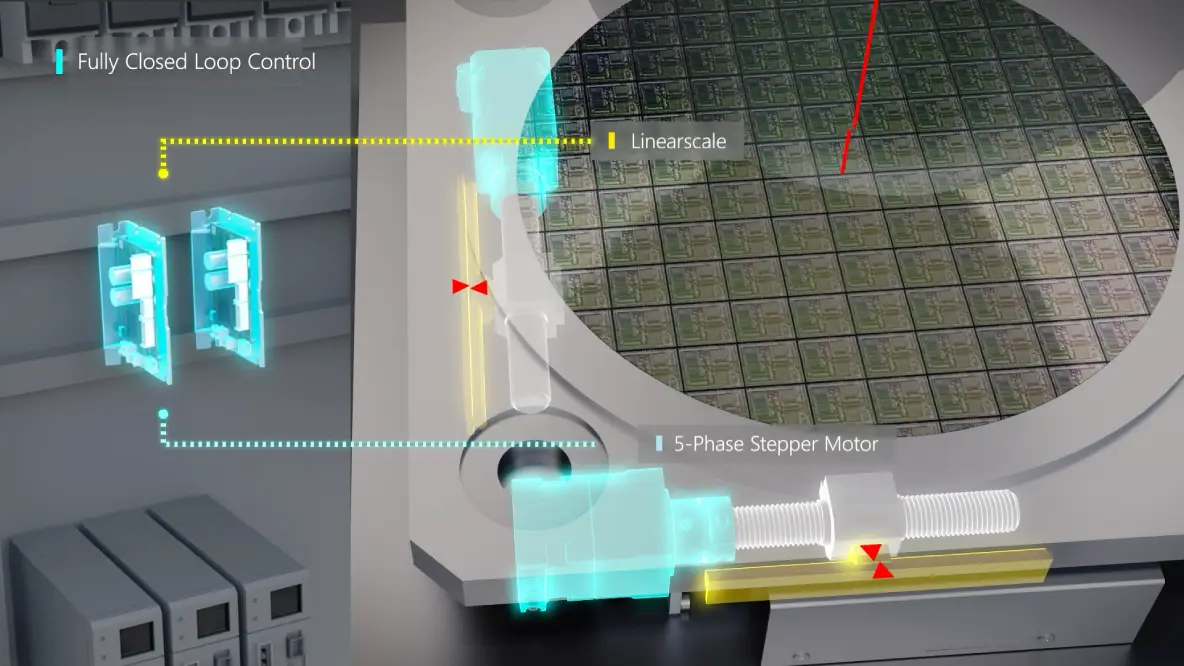
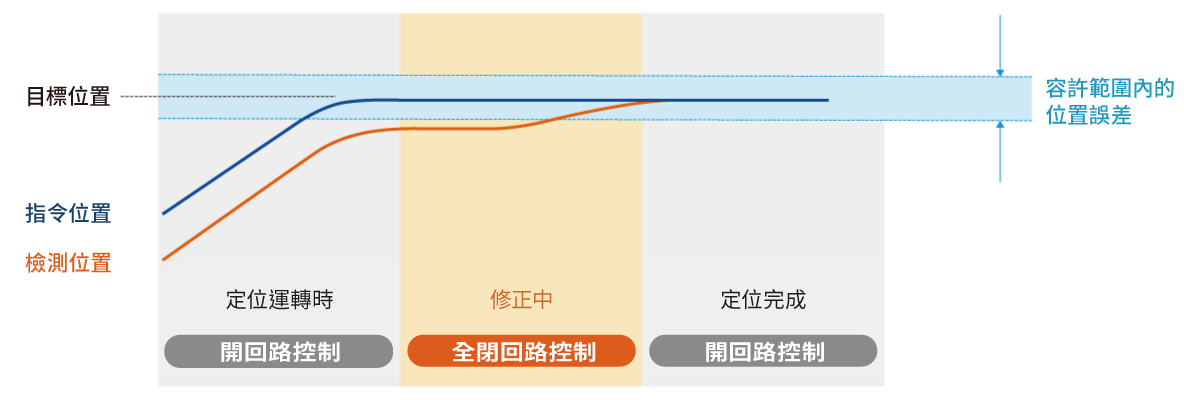
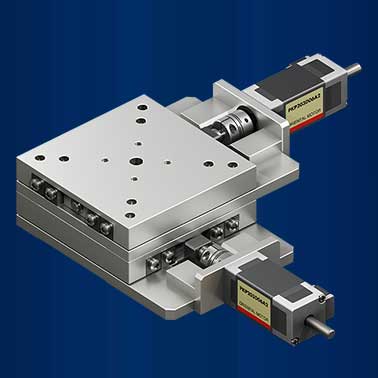
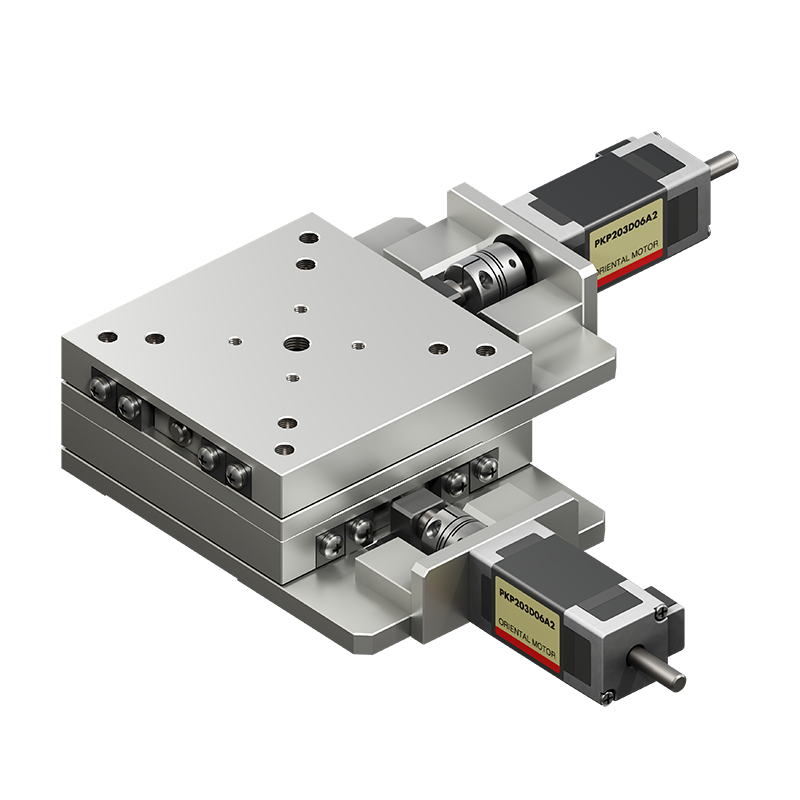
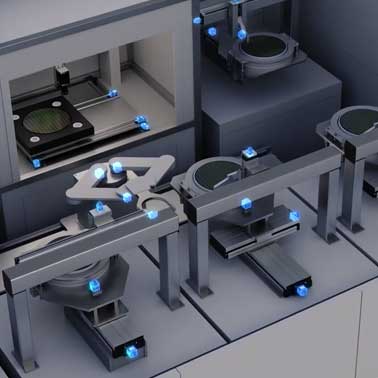
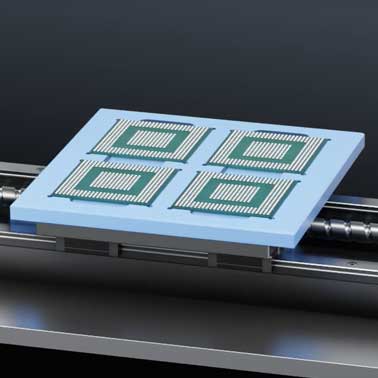
全閉迴路技術實現次微米級定位
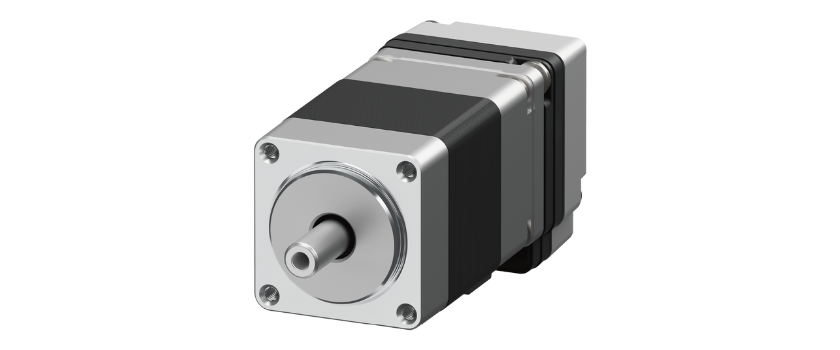
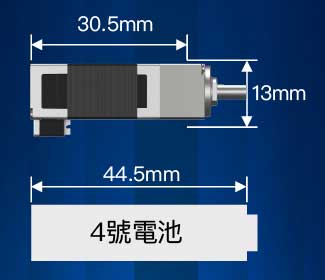
13mm馬達貢獻對位平台小型化
微型電動缸實現製程可追溯升級
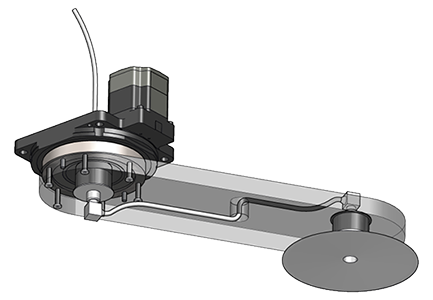
簡化擺臂設計優化走線穩定位
控制器驅動FOUP Robot實現高效搬運
影片範例:以MRC01控制東方馬達的小型機器人OVR為例比較
吸嘴多軸高速同步解決產能瓶頸
小型多軸驅動器提升設備坪效
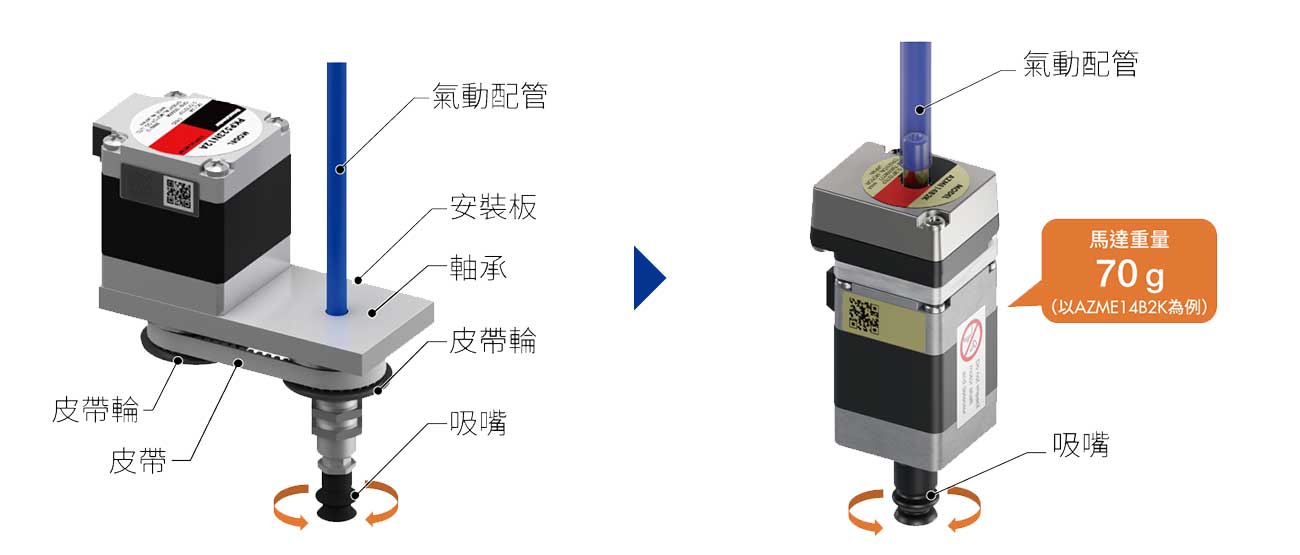
小型馬達與配線改善緊湊空間









 2025 食品包裝機械展
2025 食品包裝機械展
 2025 自動化展
2025 自動化展
 2025 半導體展
2025 半導體展
 2025 五金展
2025 五金展
 2025 醫療科技展
2025 醫療科技展
 2026 工具機展
2026 工具機展